
Neoms food company plans to build 100 ha greenhouse project in Saudi Arabia


Air & Energy climate control system researched at Botany Group:
Growing tomatoes and cucumbers with closed vents and screens

Celebrating harvest of British Columbia greenhouse vegetables

Joss Bravo joins Meteor Systems Mexico as sales manager

How fixing a customer's problem turned these guys into night-time heat loss science nerds:
Blazing hot by day but freezing at night

“These varieties benefit growers, retailers, and consumers”



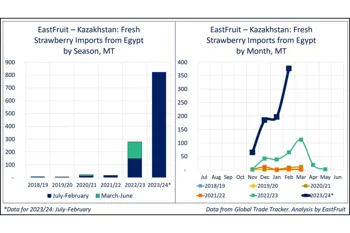
Egyptian watermelon season kicking off:
"We have tripled our greenhouse acreage"